Salome / Code_Aster¶
Ubuntu 20.04でのSalome-Meca 2020のインストール¶
最新版のSalome-Meca環境のインストール方法について説明します。
# first thing is that your system should be up to date.
sudo apt-get update
sudo apt-get upgrade
# create salome directory in your HOME directory. Run this command
cd $HOME
mkdir salome_meca
cd salome_meca
# download Salome tar files
wget https://www.code-aster.org/FICHIERS/salome_meca-2020.0.1-1-universal.tgz
# untar the file
tar -xvf salome_meca-2020.0.1-1-universal.tgz
# the untared file should be named as Salome-V8_4_0-univ_public.run or something similar
# the file needs to be changed with the command
chmod +x Salome-V8_4_0-univ_public.run
# now you should be able to install Salome with the command
./Salome-V8_4_0-univ_public.run
# press "Enter" and choose language English or French.
# after the installation you should have a salome icon in your PC screen.
Ubuntu 18.04でのCode_Asterコンパイル¶
UBUNTU 18.04でマルチスレッドモードでCode_asterを使うには、ソースからコンパイルする必要があります。そのためには、必要な依存関係ツールをインストールする必要があります。Code_asterのソースコードは、このリポジトリまたは リンク から取得できます。
前提条件¶
Code_asterに必要なツールをインストールします:
gcc, g++, gfortran,
cmake,
python3,
python3-dev,
python3-numpy,
tk,
bison,
flex,
liblapack-dev 、 libblas-dev または libopenblas-dev 、
libboost-python-dev (+ ubuntu では libboost-numpy-dev、 centos ではboost-devel)、
zlib (debian/ubuntu上では zlib1g-dev という名前です)。
パッケージマネージャを使用します。UbuntuおよびDebian指向のシステムでは、コマンドは次のようになります:
sudo apt-get install gfortran
コンパイル¶
Code_asterをコンパイルするには、ソースコードをインストールディレクトリにダウンロードしてください。
wget https://www.code-aster.org/FICHIERS/aster-full-src-14.6.0-1.noarch.tar.gz
ファイルをダウンロードしたら、次のコマンドを使用して展開してください:
gunzip aster-full-src-14.6.0-1.noarch.tar.gz
tar -xvf aster-full-src-14.6.0-1.noarch.tar
コードをコンパイルします。次のコマンドを使用してください:
python3 setup.py install --prefix=/your/installation/path/to/code/aster
システム上のすべてのディレクトリでCode_asterとASTKを使用するには、.bashrcファイルに行を追加する必要があります。
cd
source /your/installation/path/to/code/aster/etc/codeaster/profile.sh > .bashrc
source .bashrc
この操作にはroot権限が必要な場合があるので、コマンドの最初にsudoを追加してください。
Code_asterでASTKを使う方法¶
ディレクトリをシミュレーションディレクトリに変更します。このディレクトリには、ソルバー入力ファイル (*.comm) とメッシュファイルがあるはずです。2つのダミーファイルresult.rmed (シミュレーションの結果があるはずです) とerror.mess (ソルバーのログファイル) およびASTK環境用の.astkファイルを作成します。 touchコマンドを使用します:
touch result.rmed
touch error.mess
touch RunCase_1.astk
ターミナルで次のように入力します。
astk
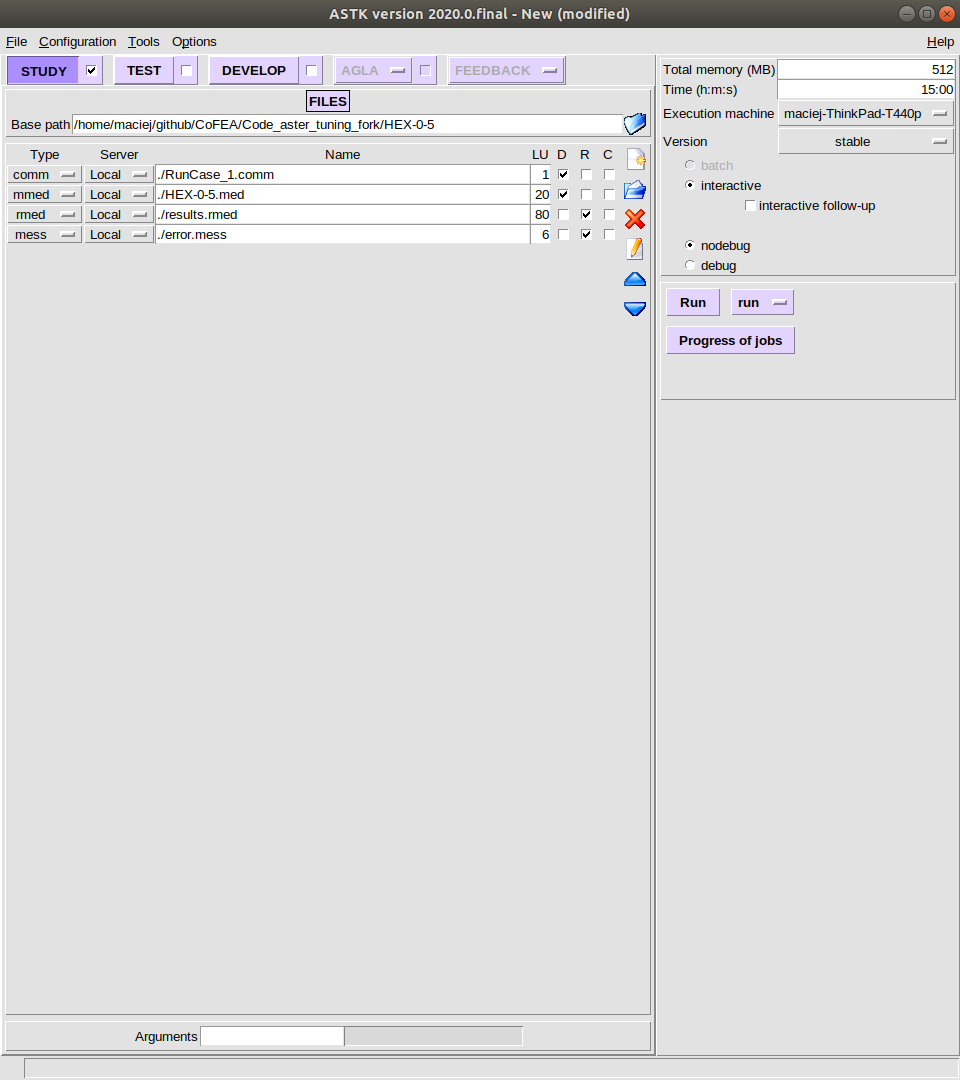
ASTKウィンドウが、ジョブの進行状況ウィンドウとともに表示されます。
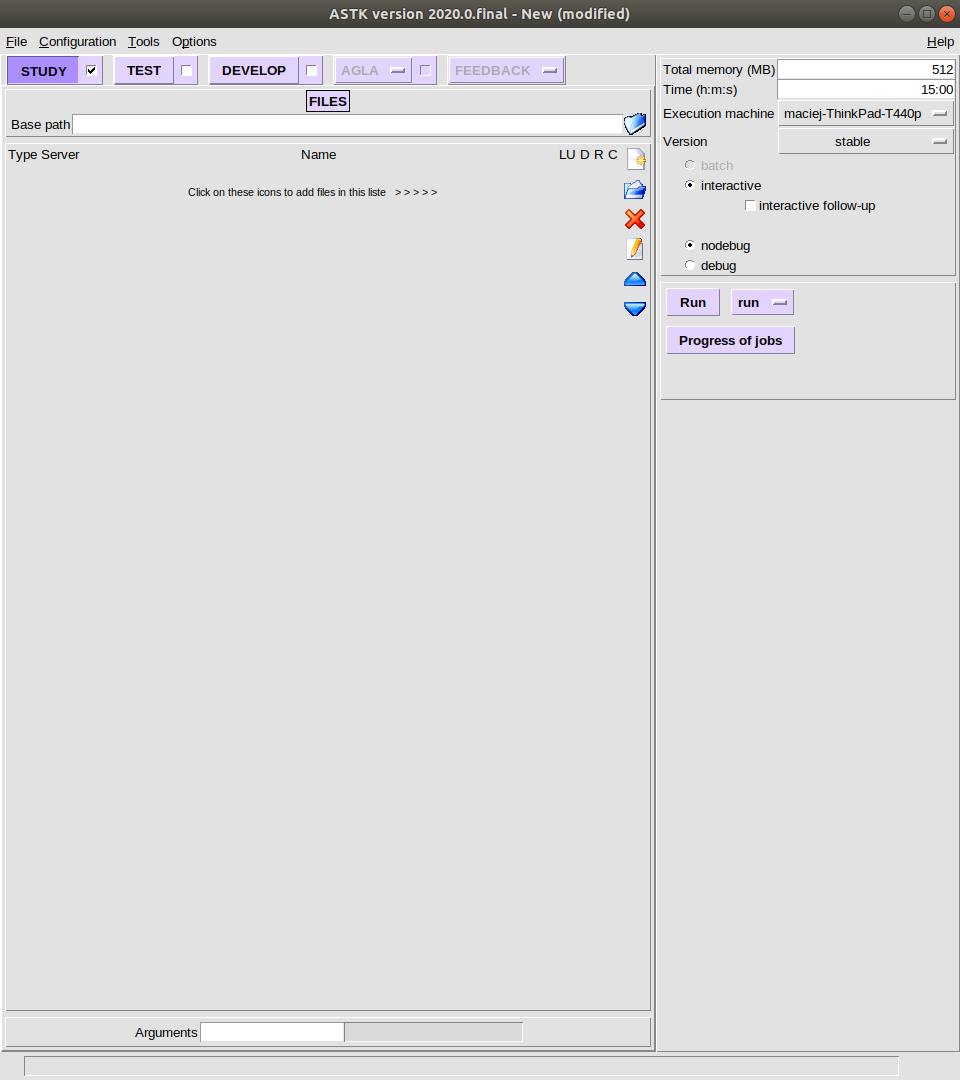
Base path で作業ディレクトリを選択し、.commファイル、メッシュファイル、.rmed、および*.messを追加して、青いフォルダアイコンでシミュレーションを実行します。シミュレーションを開始するには、 run をクリックします。